

As a consequence of their energy and velocity, robotic arms are normally completely hooked up to flooring or different constructions for added stability, which limits their vary. The purpose of the analysis, carried out at EPFL's Laboratory of Algorithms and Studying Methods (LASA), was to develop a bimodal robotic hand with prolonged greedy capabilities, together with occasional independence from the robotic arm to which it’s hooked up.
Robotic palms are normally designed with one objective in thoughts: to carry on to issues. To develop one that would do this and crawl by itself, just like the Addams Household Factor, researchers generated and refined a fundamental design utilizing a genetic algorithm (which depends on organic tips like pure choice and evolution ) and the MuJoCo physics simulator to check. practicality of iterations.
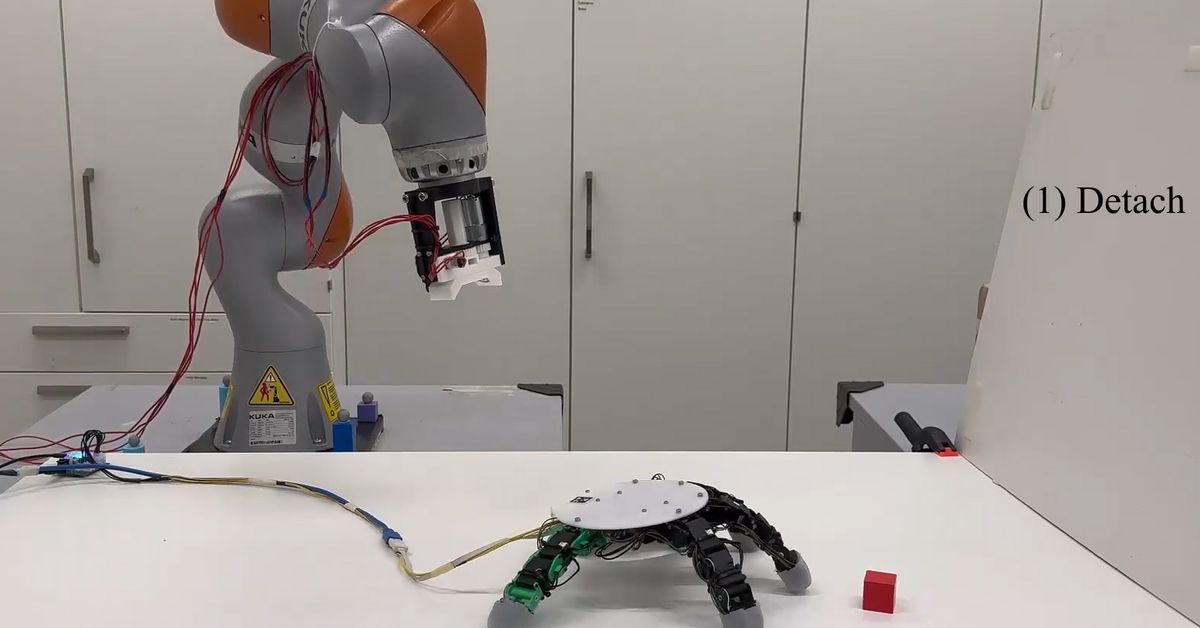
The algorithm and simulations helped the researchers decide the optimum place and variety of jointed fingers wanted, which turned out to be 5, in an look just like human palms. The robotic hand additionally makes use of a magnetic wrist connector, permitting it to connect and detach from an arm autonomously.
The fingers of the hand can bend in each instructions, permitting him to make use of a few of them to choose up objects, whereas the remainder perform as tiny toes. This design additionally extends the hand's usefulness whereas hooked up to a robotic arm. Can elevate a number of objects concurrently with out twisting the arm to reposition unused fingers.
The hand can also be significantly smaller than robots like Boston Dynamics' Spot, which may transfer freely utilizing 4 legs. Spot has already been upgraded along with his personal robotic arm and grip, however with an independently functioning articulated hand, he is likely to be higher geared up to discover or analyze areas Spot can't sneak into.